13:40 29-03-2022
В последнее время большинство фирм, академические институты и исследовательские организации по всему миру предпринимают попытки разработки безопасных и надежных автономных транспортных средств.
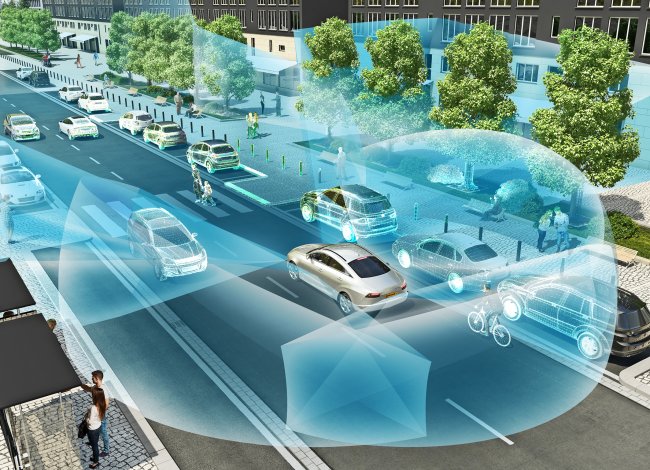
Но для крупномасштабного развертывания данный транспорт должен обладать возможностью передвижения по различным дорогам и в разных средах, исключая столкновение с прочими машинами, животными, пешеходами, велосипедистами и близлежащими препятствиями. Специалисты Мэрилендского университета уже успели разработать новую методику, повышающую эффективность симуляторов, которые сейчас используются для эффективного обучения специальных моделей навигации современных беспилотных авто. Данный метод основан на исследовании, связанном с автономной навигацией машин. Цель данной работы заключается в разработке надёжных технологий, позволяющих осуществлять обнаружение и классифицирование поведения прочих участников дорожного движения и использование данного поведения для того, чтобы управлять траекторией движения автономного автотранспорта.
 Поведение водителей за рулем делят на консервативное и агрессивное. Первый тип автомобилистов является более осторожным и внимательным. Агрессивные автолюбители могут проявлять воинственность и неуравновешенность. Точное обнаружение данных разных моделей вождения станет полезным для автономного транспорта, в особенности во время критических моментов. Благодаря этому обеспечивается адаптация траекторий движения и мер безопасности. Исследователи представили новый симулятор, который основан на поведении водителей. Он способен эмулировать множество разных вариантов поведения, которые наблюдаются в реальных различных сценариях дорожного движения. Таким образом, базовые навигационные системы способны осуществлять обработку сложного поведения вождения непосредственно в реальных различных условиях. Метод моделирования, который представили исследователи, является основанным на модели, готовой к самостоятельной классификации поведения прочих участников движения. Данная модель получила название CMetric. Она занимается анализом траектории прочих участников движения.
Поведение водителей за рулем делят на консервативное и агрессивное. Первый тип автомобилистов является более осторожным и внимательным. Агрессивные автолюбители могут проявлять воинственность и неуравновешенность. Точное обнаружение данных разных моделей вождения станет полезным для автономного транспорта, в особенности во время критических моментов. Благодаря этому обеспечивается адаптация траекторий движения и мер безопасности. Исследователи представили новый симулятор, который основан на поведении водителей. Он способен эмулировать множество разных вариантов поведения, которые наблюдаются в реальных различных сценариях дорожного движения. Таким образом, базовые навигационные системы способны осуществлять обработку сложного поведения вождения непосредственно в реальных различных условиях. Метод моделирования, который представили исследователи, является основанным на модели, готовой к самостоятельной классификации поведения прочих участников движения. Данная модель получила название CMetric. Она занимается анализом траектории прочих участников движения. 
Специалисты Мэрилендского университета в рамках разработки этого проекта воспользовались политикой глубокого эффективного обучения с подкреплением, основанной на DQN. Модель прогнозирования возможного поведения во время вождения можно интегрировать с множеством современных алгоритмов непосредственно для навигации автотранспорта. Из этого следует, что прочие команды по всему земному шару могут воспользоваться ей для того, чтобы улучшить обучение своих моделей и повысить общую производительность. Метод моделирования, который разработала группа исследователей, поможет в итоге в улучшении производительности данных моделей в сложнейших сценариях движения в городе. В завершении стоит отметить, что в последнее время наблюдается интенсивное развитие технологий, связанных с искусственным интеллектом, которыми успешно пользуются мировые автобренды по всему земному шару.
На Вашем счету недостаточно средств. Пополните счет и попробуйте снова.
Для подключения подписки отправьте СТАРТ1 на номер НОМЕР.